ML学习笔记 #01 CNN & RNN
1 卷积神经网络 | Convolution Neural Network
1.1 why cnn?
一张图片是三维的矩阵,对应的维度为 \([width, col, channel]\)。将三维的矩阵 flatten 为 channel 个 \(width \times col\) 的长向量,并输入神经网络。
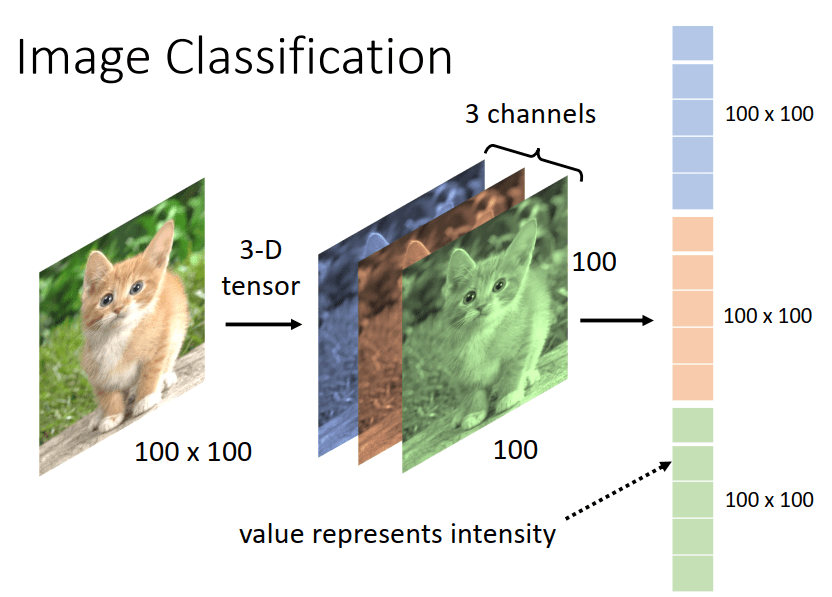
这样的做法存在着以下缺点:
全连接参数多
在全连接前馈神经网络中, 如果第 \(l\) 层有 \(M_{l}\) 个神经元,第 \(l-1\) 层有 \(M_{l-1}\) 个 神经元,连接边有 \(M_{l} \times M_{l-1}\) 个,权重矩阵有 \(M_{l} \times M_{l-1}\) 个参数。当 \(M_{l}\) 和 \(M_{l-1}\) 都很大时,权重参数非常多,训练效率降低,易出现过拟合。
局部不变性
自然图像中的物体都具有局部性特征(如图中猫的耳朵、眼睛,对应物体分类而言是重要的特征), 而全连接前馈网络很难提取。
1.2 结构 | Structure
CNN 并非是对旋转、放大不变的,因此它需要数据增强。
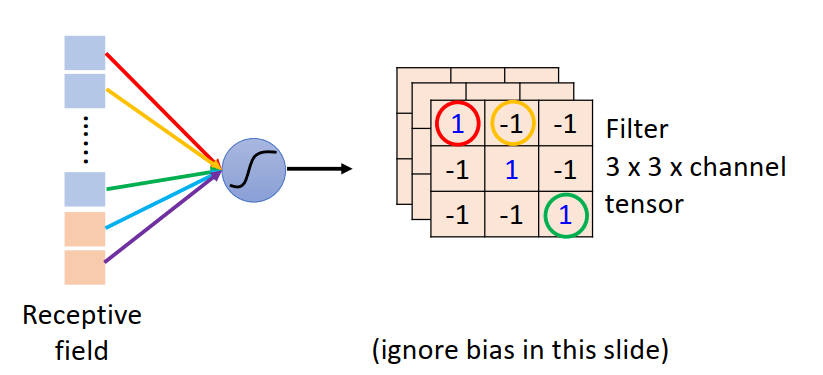
感受野 | Receptive field
stride:感受野步长大小 \(S\)
padding:填充大小 \(P\)
kernel size:感受野大小 \(W \times W\)
卷积层 | Convolution
- 从神经网络的角度理解:
- 不同的感受野共享参数
- 从 Filter 的角度理解:
- 使用 Filter 扫整张图片,提取一个局部区域的特征, 不同的卷积核相当于不同的特征提取器
- 卷积层输出大小:\(N = (W − F + 2P)/S + 1\)
池化层 | Pooling
特点:无需学习的参数
作用
进行特征选择,降低特征数量,从而减少参数数量。
原因
卷积层虽然可以显著减少网络中连接的数量,但特征映射组中的神经元个数并没有显著减少。如果后面接一个分类器,分类器的输入维数依然很高,很容易出现过拟合、计算复杂度高。 在卷积层之后加上一个汇聚层,从而降低特征维数,避免过拟合。
池化函数
- Max Pooling:最大池化,选出最显著的像素
- Mean Pooling:平均池化
1.3 图片转换 | Image Transformation
平移、旋转、缩放都是在原始对图像矩阵上进行运算。
缩放 \[ \left[\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right]=\left[\begin{array}{cc} a & 0 \\ 0 & d \end{array}\right]\left[\begin{array}{l} x \\ y \end{array}\right]+\left[\begin{array}{l} 0 \\ 0 \end{array}\right] \]
旋转,旋转 \(\theta\) ° \[ \left[\begin{array}{l} x^{\prime} \\ y^{\prime} \end{array}\right]=\left[\begin{array}{cc} \cos \theta & -\sin \theta \\ \sin \theta & \cos \theta \end{array}\right]\left[\begin{array}{l} x \\ y \end{array}\right]+\left[\begin{array}{l} 0 \\ 0 \end{array}\right] \]
2 循环神经网络 | RNN
在许多现实任务中,网络的输出不仅和当前时刻的输入相关, 也和其过去一段时间的输出相关。例如一个有限状态自动机, 其下一个时刻的状态( 输出) 不仅仅和当前输入相关, 也和当前状态( 上一个时刻的输出) 相关。
为了处理时序数据并利用其历史信息, 需要让网络具有短期记忆能力。而前馈网络是一种静态网络, 不具备这种记忆能力,因此提出了循环神经网络 RNN。
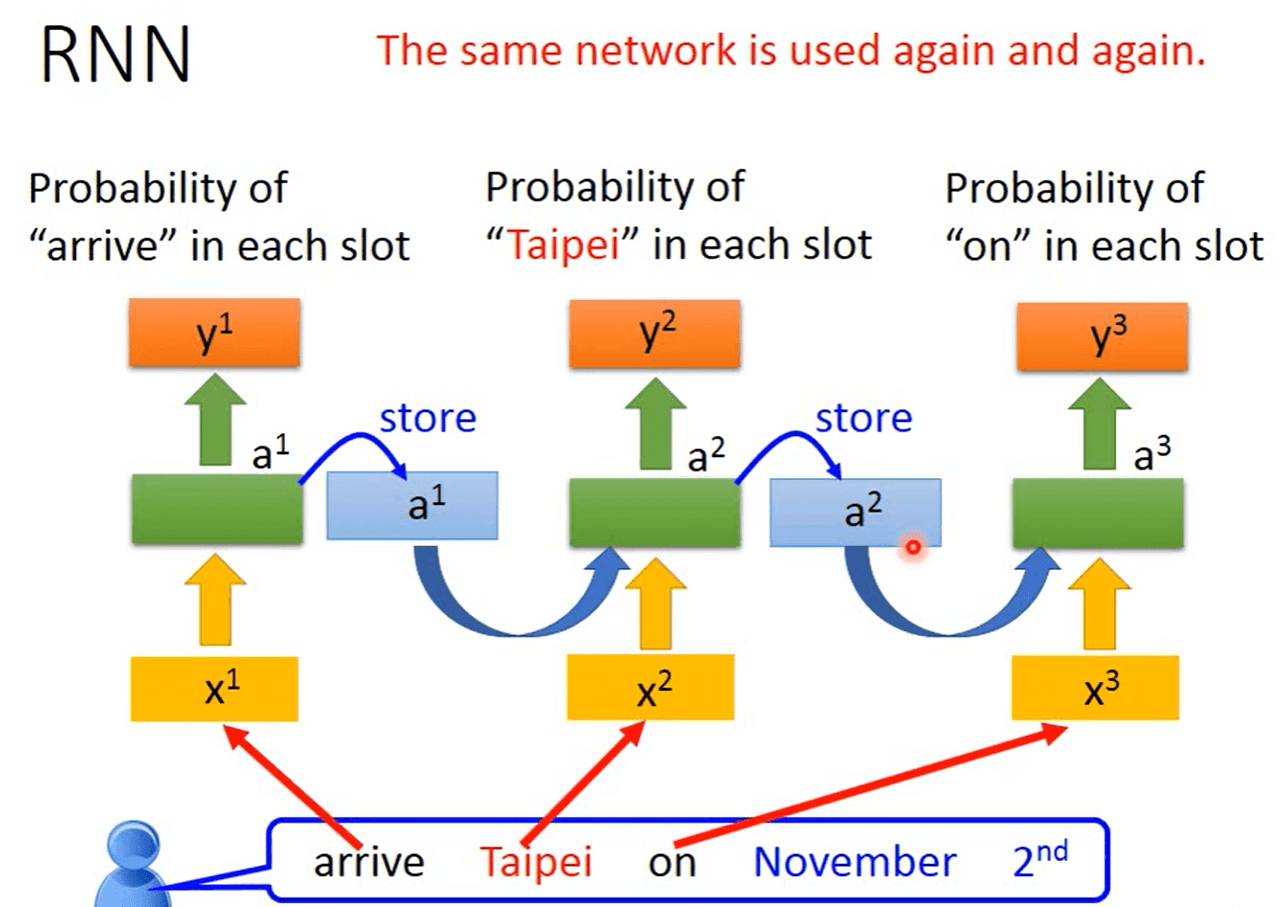
2.1 简单循环网络 | Simple Recurrent Network
有特定的 memory 存储上一个时刻的状态值
令向量 \(\boldsymbol{x}_t \in \mathbb{R}^M\) 表示在时刻 \(t\) 时网络的输入, \(\boldsymbol{h}_t \in \mathbb{R}^D\) 表示隐藏层状态值,则 \(\boldsymbol{h}_t\) 不仅和当前时刻的输入 \(\boldsymbol{x}_t\) 相关, 也和上一个时刻的 隐藏层状态 \(\boldsymbol{h}_{t-1}\) 相关,更新公式为 \[ \boldsymbol{z}_t=\boldsymbol{U} \boldsymbol{h}_{t-1}+\boldsymbol{W} \boldsymbol{x}_t+\boldsymbol{b} \]
\[ \boldsymbol{h}_t=f\left(\boldsymbol{z}_t\right) \]
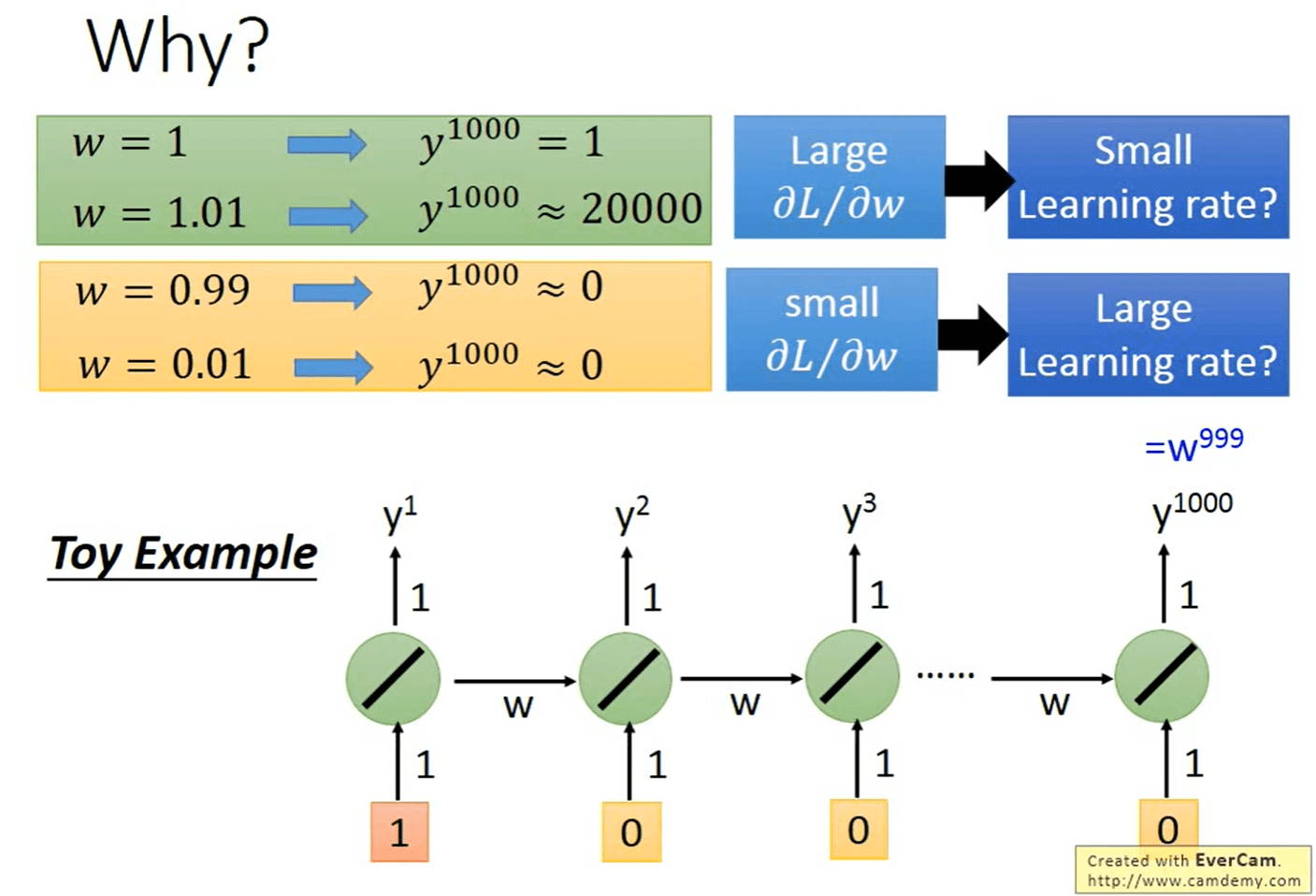
缺点:RNN 每个时刻计算结果后乘 \(w\) 作为下一刻的输入,导致最后一次计算的结果形式上是 \(w\) 累乘。并使用非线性激活函数为 Logistic 函数或 Tanh 函数作为非线性激活函数, 其导数值都小于 1。在建模长时间间隔( Long Range) 的状态之间的依赖关系时,会出现 梯度消失(gradient vanishing) 和 gradient explode 的问题。
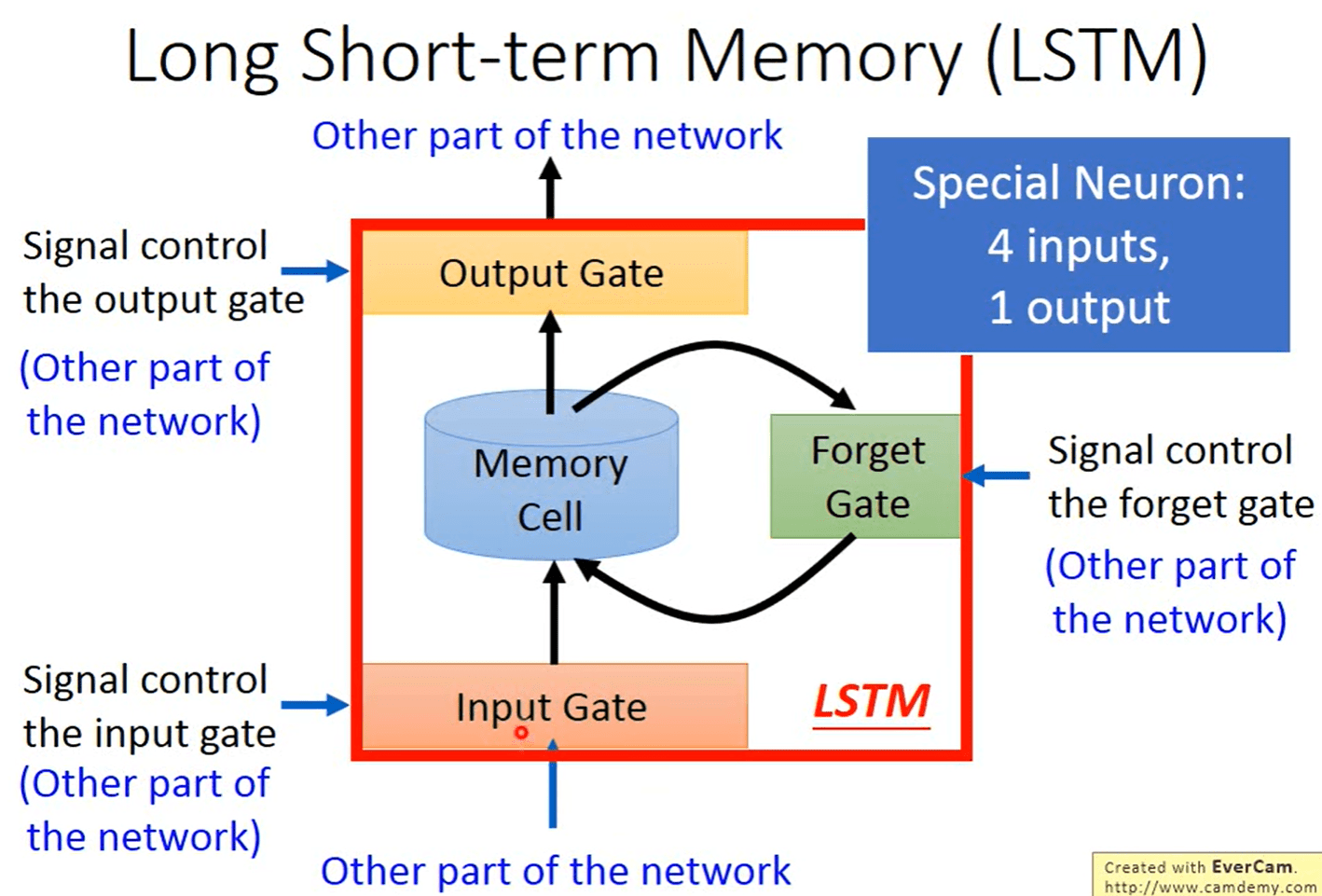
2.2 长短期记忆网络 | LSTM
为了改善循环神经网络的长程依赖问题, 引入门控机制来控制信息的累积速度, 包括有选择地加入新的信息, 并有选择地遗忘之前累积的信息。
因此,长短期记忆网络( Long Short-Term Memory Network, LSTM)被提出,主要改进点有两个方面:
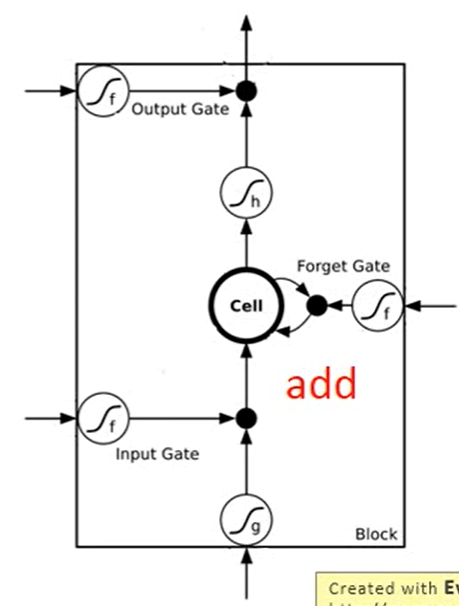
- 新的内部状态: LSTM网络引入新的内部状态 \(C_t\) 专门进行线性的循环信息传递, 同时( 非线性地) 输出信息给隐藏层的外部状态 \(h_t\) , \(C_t\) 计算公式如下:
\[ \begin{aligned} \boldsymbol{C}_t &=\boldsymbol{f}_t \odot \boldsymbol{C}_{t-1}+\boldsymbol{i}_t \odot \tilde{\boldsymbol{C}}_t \\ \boldsymbol{h}_t &=\boldsymbol{o}_t \odot \tanh \left(\boldsymbol{C}_t\right) \end{aligned} \]
其中 $$ 表示向量元素乘积,\(\tilde{\boldsymbol{C}}_t\) 是通过非线性函数得到新的候选状态,即 new memory \[ \tilde{\boldsymbol{C}}_t = tanh(\boldsymbol{W}_{c}\boldsymbol{x}_t + \boldsymbol{U}_{c}\boldsymbol{h}_{t-1} + \boldsymbol{b}_{c}) \] 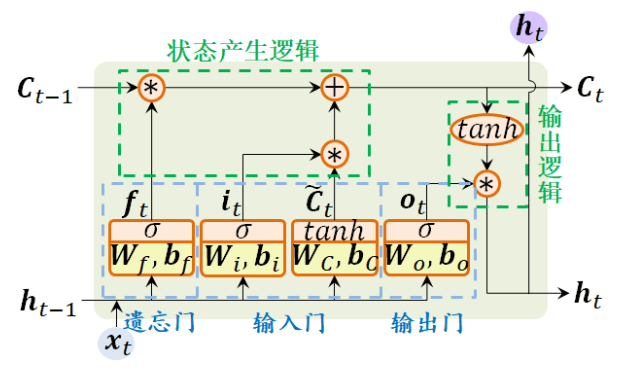
门控机制: 门( gate) 为一个二值变量{0, 1}, 0代表关闭状态, 不许任何信息通过; 1代表开放状态, 允许所有信息通过。LSTM 引入三个“门” 分别为输入门 \(\boldsymbol{i}_{t}\)、遗忘门 \(\boldsymbol{f}_{t}\) 和输出门 \(\boldsymbol{o}_{t}\)。这三个门 是一种“软” 门, 取值在 (0, 1) 之间,以一定的比例允许信息通过 。
- 遗忘门 \(\boldsymbol{f}_{t}\) 控制上一个时刻的内部状态 \(\boldsymbol{C}_{t-1}\) 需要遗忘多少信息
- 输入门 \(\boldsymbol{i}_{t}\) 控制当前时刻的候选状态 $_t $ 有多少信息需要保存
- 输出门 \(\boldsymbol{o}_{t}\) 控制当前时刻的内部状态 \(\boldsymbol{C}_{t}\) 有多少信息需要输出给外部状态 $_t $
\[ \begin{aligned} \boldsymbol{i}_t &=\sigma\left(\boldsymbol{W}_i \boldsymbol{x}_t+\boldsymbol{U}_i \boldsymbol{h}_{t-1}+\boldsymbol{b}_i\right), \\ \boldsymbol{f}_t &=\sigma\left(\boldsymbol{W}_f \boldsymbol{x}_t+\boldsymbol{U}_f \boldsymbol{h}_{t-1}+\boldsymbol{b}_f\right) \\ \boldsymbol{o}_t &=\sigma\left(\boldsymbol{W}_o \boldsymbol{x}_t+\boldsymbol{U}_o \boldsymbol{h}_{t-1}+\boldsymbol{b}_o\right) \end{aligned} \]
注意:\(\boldsymbol{W}_*\)、\(\boldsymbol{U}_*\)、\(\boldsymbol{b}_*\)均为可学习的网络参数,也可以将 \(\boldsymbol{x}_t\)、\(\boldsymbol{h}_{t-1}\) 拼接在一起,共享参数 \(\boldsymbol{W}_*\)
LSTM是涉及memory 和 input 状态信息的累加,一定程度上解决了 gradient vanishing 问题。
与简单循环网络的区别
- 简单循环网络中的隐状态 \(\boldsymbol{h}\) 存储了历史信息, 每个时刻都会被重写, 是一种短期记忆。
- LSTM 中, \(\boldsymbol{h}\) 看作网络参数, 隐含了从训练数据中学到的经验, 其更新周期要远远慢于短期记忆。记忆单元 \(\boldsymbol{C}\) 可以在某个时刻捕捉到某个关键信息,并将此关键信息保存一定的时间间隔生命。
2.3 GRU | 门控循环单元
GRU(Gate Recurrent Unit)是 RNN 的一种。和 LSTM 一样,也是为了解决长期记忆和反向传播中的梯度等问题而提出来的,相比之下参数量少,更容易进行训练,提高训练效率。
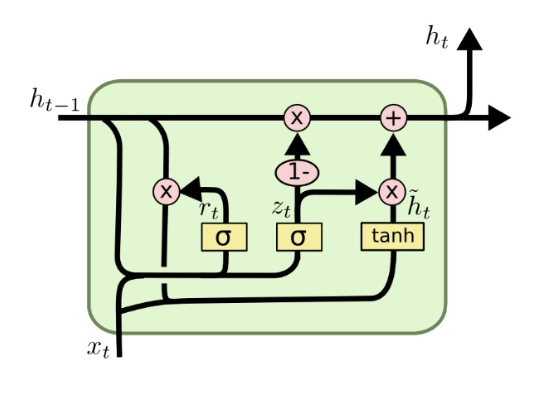
- 模型输入:上一个时刻传输的状态 \(h_{t−1}\) 和当前节点的输入 \(x_t\) ,相比于 LSTM 只有2个输入
- 门控状态:其中 \(r\) 控制重置的门控(reset gate), \(z\) 为控制更新的门控(update gate),update gate的作用类似于input gate和forget gate
\[ \begin{aligned} &z_t=\sigma\left(W_z \cdot\left[h_{t-1}, x_t\right]\right) \\ &r_t=\sigma\left(W_r \cdot\left[h_{t-1}, x_t\right]\right) \\ \end{aligned} \]
新的候选状态: \[ \hat{h}_t=\tanh \left(W \cdot\left[r_t* h_{t-1}, x_t\right]\right) \\ \]
更新状态:同时进行了遗忘、记忆两个步骤 \[ h_t=\left(1-z_t\right) * h_{t-1}+z_t * \hat{h}_t \]
- 特点在于:使用了同一个门控 z 就同时可以进行遗忘和选择记忆(LSTM则要使用多个门控)。
- 遗忘 \(z\) 和选择 \(1−z\) 是联动的。对于传递进来的维度信息,会进行选择性遗忘,遗忘了多少权重 \(z\),就使用包含当前输入的 \(\hat{h}_t\) 中所对应的权重进行弥补 \(1−z\)。以保持一种”恒定“状态。
2.4 应用
- 序列到类别模式
- 同步的序列到序列模式
- 异步的序列到序列模式